Getting Started
On Local PC
To getting strated, we have prepared some sample maps alongside different robots. For Example we run house_map model with three p3at robots as following items:
-
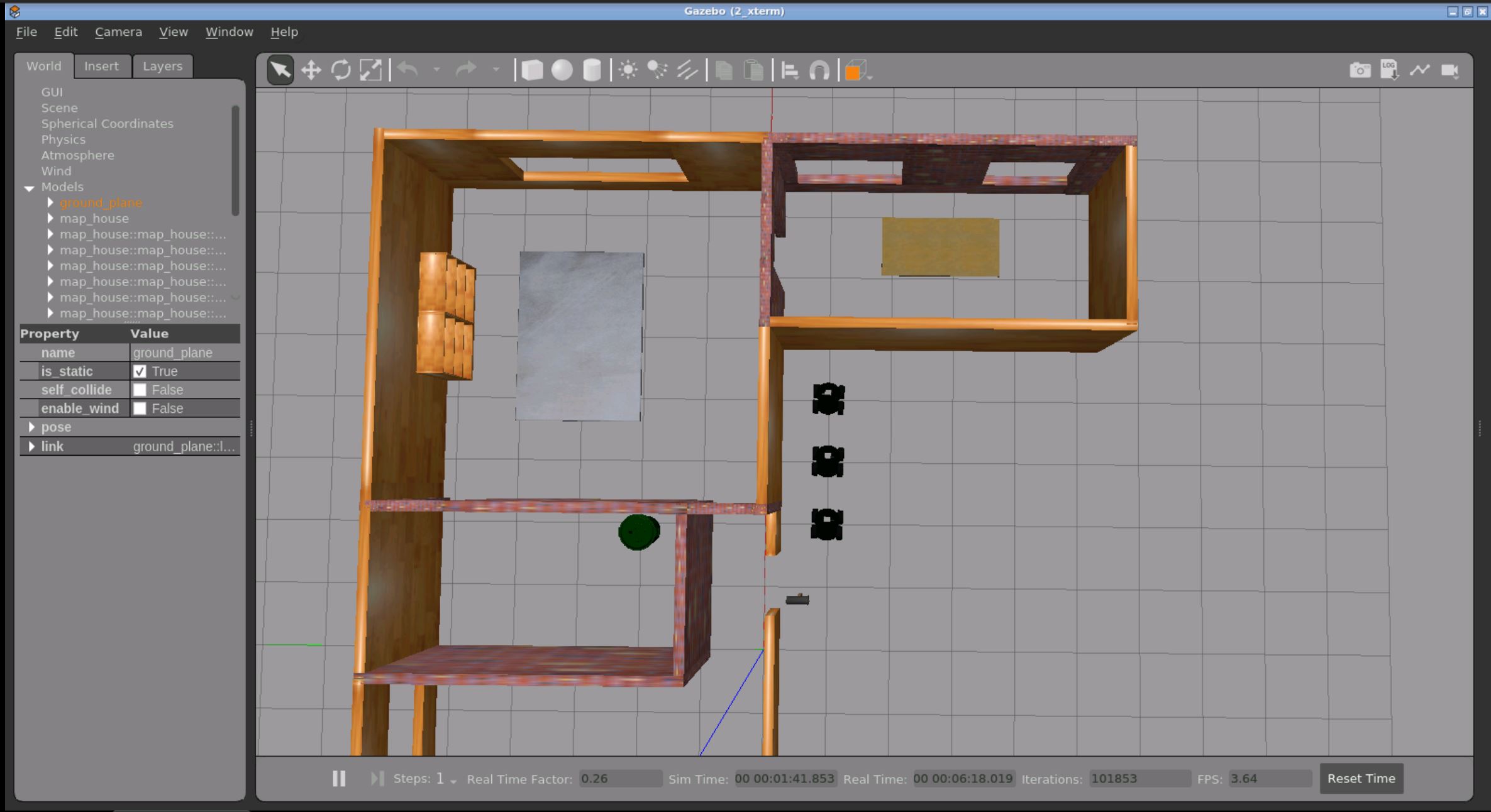
Open a terminal console with Ctrl+Alt+T and launch the house_map world map
git clone https://github.com/RoboCup-RSVRL/RoboCup2022RVRL_Demo cd ~/RoboCup2021RVRL_Demo/ colcon build source install/setup.bash ros2 launch rvrl_gazebo house_map.launch.pyAs shown in this example, three robots are spawned in the environment, each of them can be controlled manually with the following procedure. You can also check the rvrl_gazebo/launch directory to find another or map examples.
-
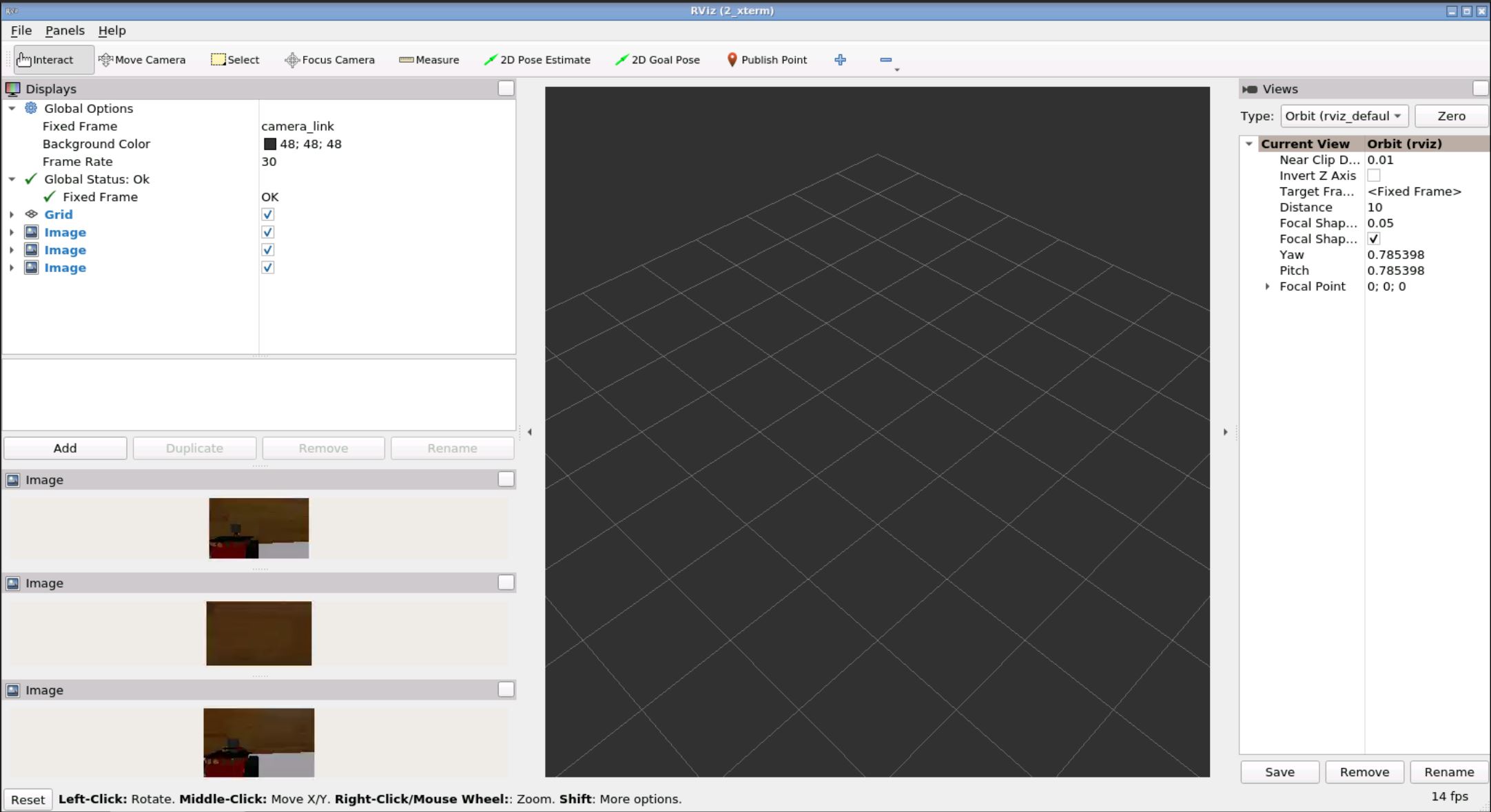
In order to see the images of the robots’ cameras, open a new tab using Crtl+T, then use the following command
source install/setup.bash ros2 run rviz2 rviz2 -
You should be able to see this screen now
-
You have to make sure that the terminal window stays on top of the gazebo window while you’re operating.
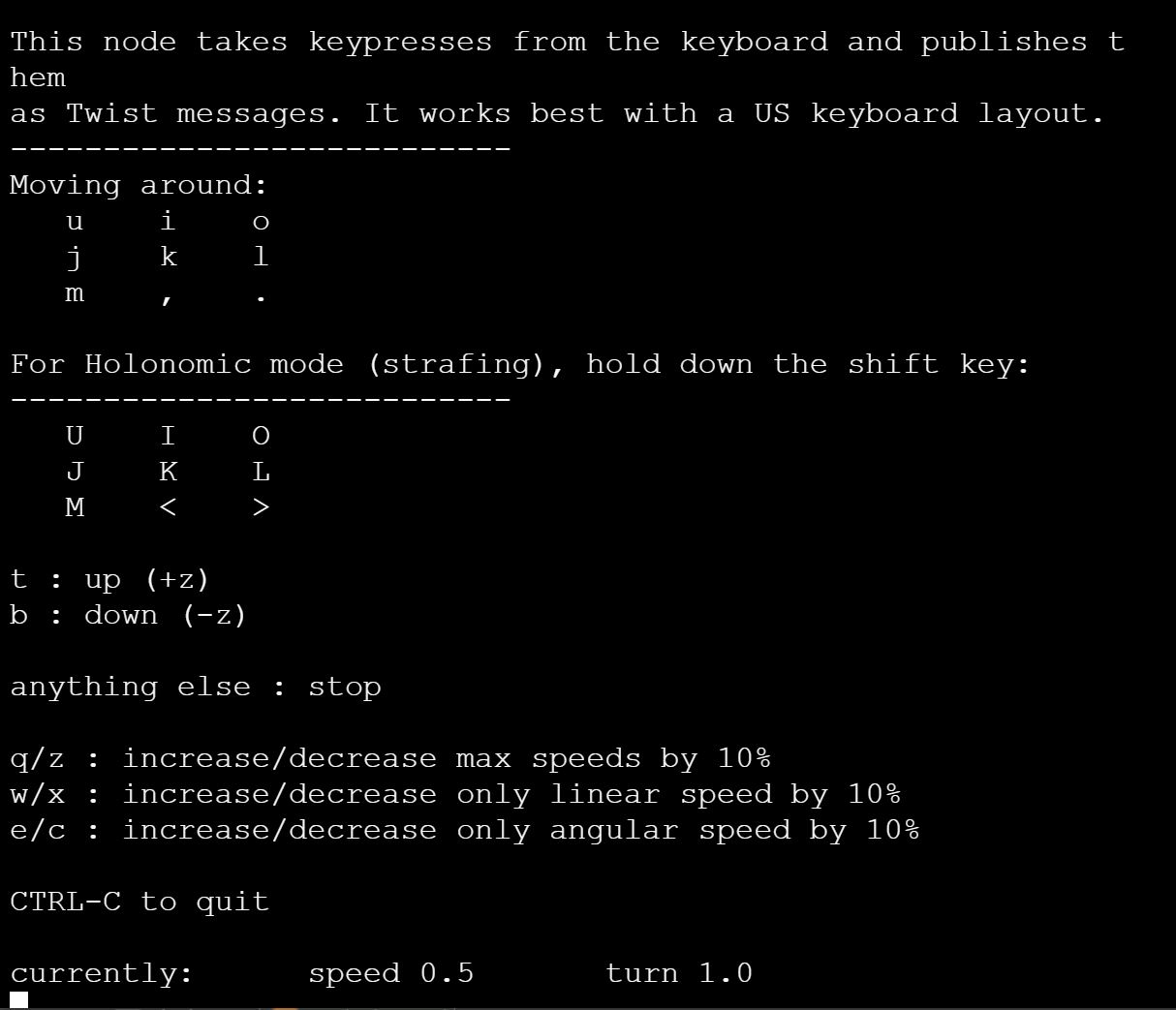
- In order to move the robots,open terminal 1 with Ctrl+Alt+T to drive the robot1 with following command:
ros2 run teleop_twist_keyboard teleop_twist_keyboard cmd_vel:=robot1/cmd_vel - You will see this screen on your terminal
- Open terminal 2 with Ctrl+Alt+T to drive the robot2 with following command:
ros2 run teleop_twist_keyboard teleop_twist_keyboard cmd_vel:=robot2/cmd_vel - Open terminal 3 with Ctrl+Alt+T to drive the robot3 with following command:
ros2 run teleop_twist_keyboard teleop_twist_keyboard cmd_vel:=robot3/cmd_vel - Open terminal 4 with Ctrl+Alt+T to get the robots image camera with following command:
ros2 run rqt_image_view rqt_image_view
On The ConstructSim
- In case you are working on ConstructSim, click on Web shell on the lower left part of the page.
- You will see the terminal open, act like local pc mode
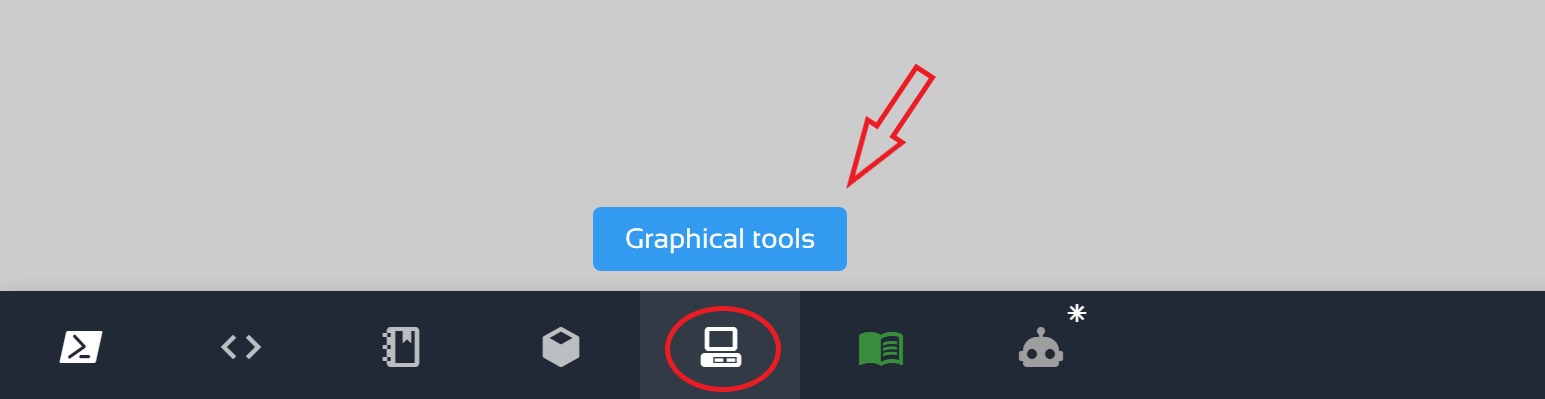
- You can also visit the graphical intereface by followin picture